Kokki — A Humanoid Cooking Assistant
Built at CMU-Africa in Prof. Conrad Tucker’s Humanoid Robotics course. Our team designed, printed, and programmed a 5-DoF arm that helps cook Jollof—safely and repeatably.
Summary
- 5-DoF arm + adaptive hand
- Real-time object detection
- SSC-32U control
- Custom Inverse Kinematics (IK)
- Calibration UI, and timed routines
Interaction & Design Evolution
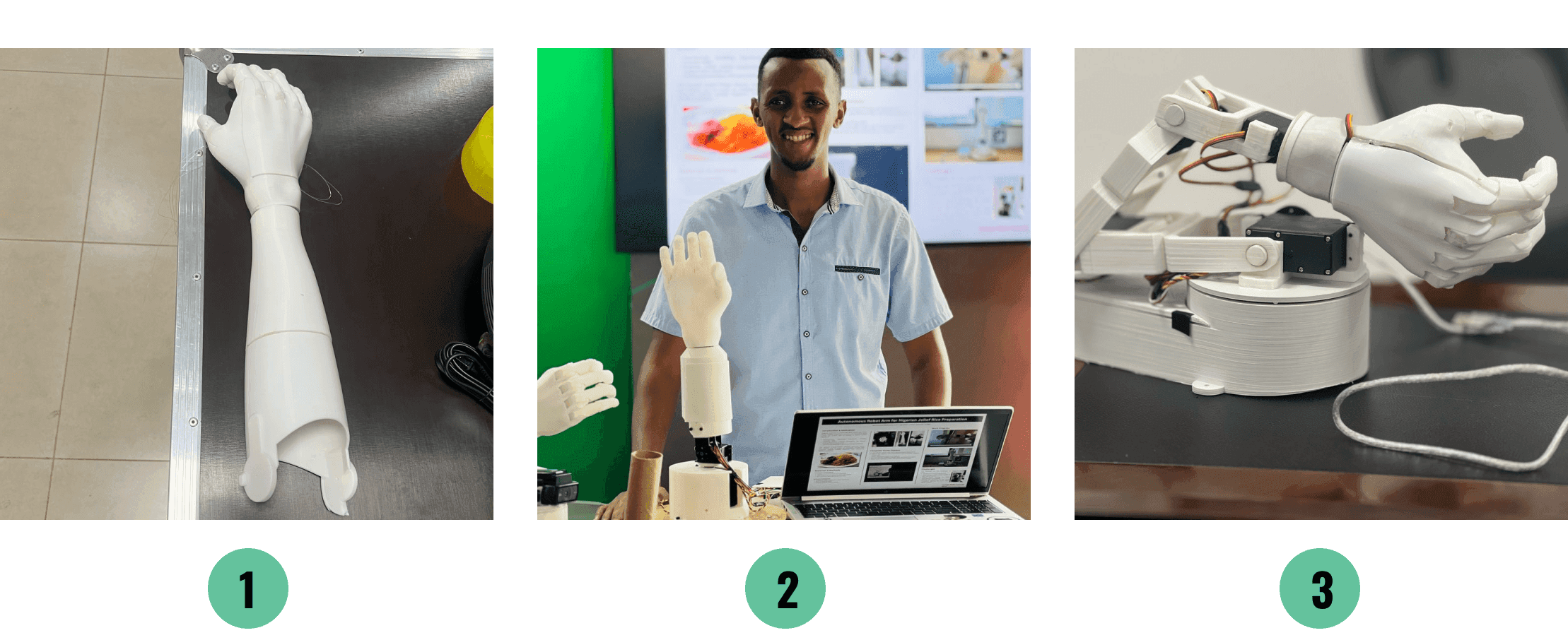
We started with a simple handshake idea and evolved it into a true kitchen helper. Early sketches shaped how the arm should move around a stove, hold tools, and work with a person—reliably and safely. The design matured through quick CAD iterations and printed prototypes.
System Architecture
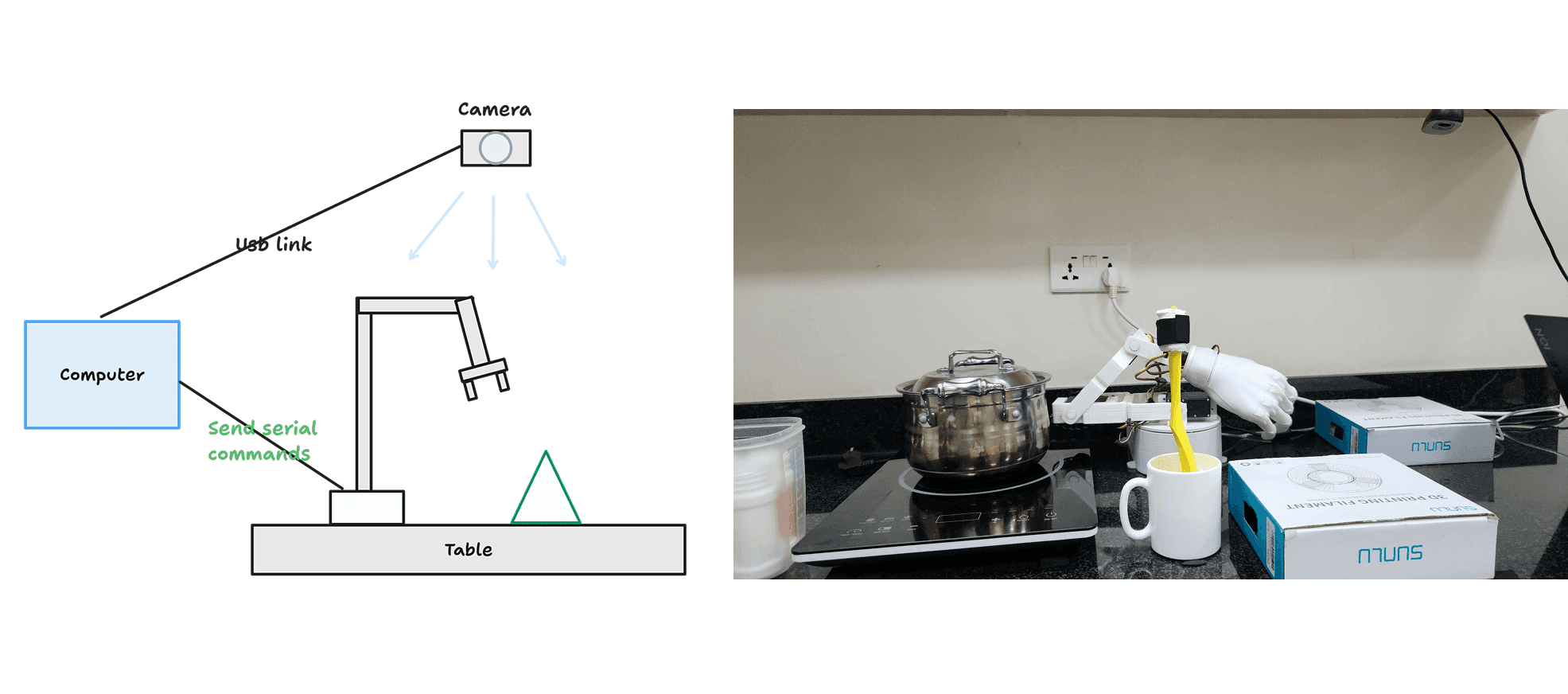
Kokki links perception, planning, and motion into one loop. The detector spots tools and ingredients, the planner finds safe joint angles, and the controller executes smooth, timed moves—while a calibration UI keeps everything aligned.
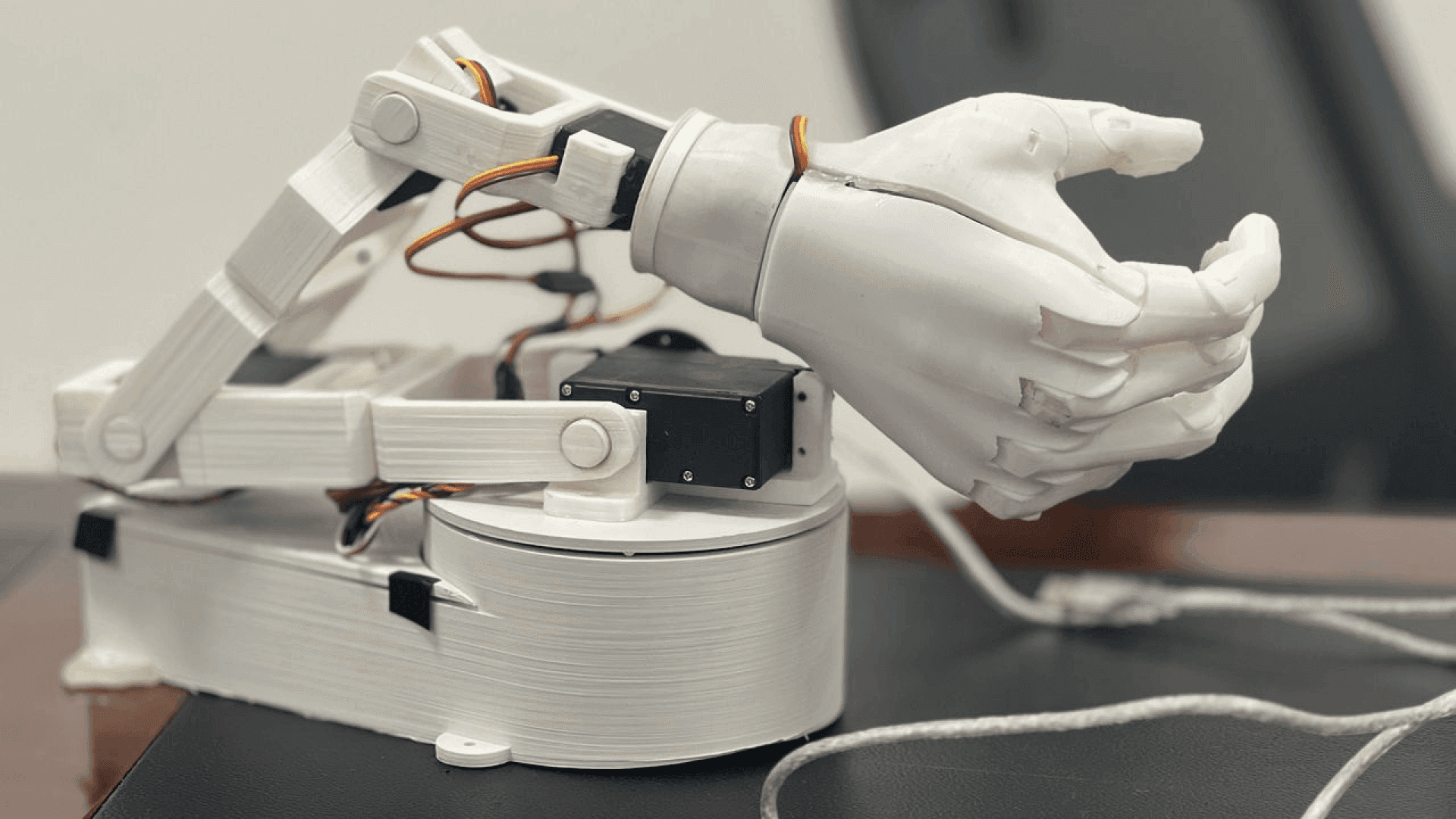
Hardware
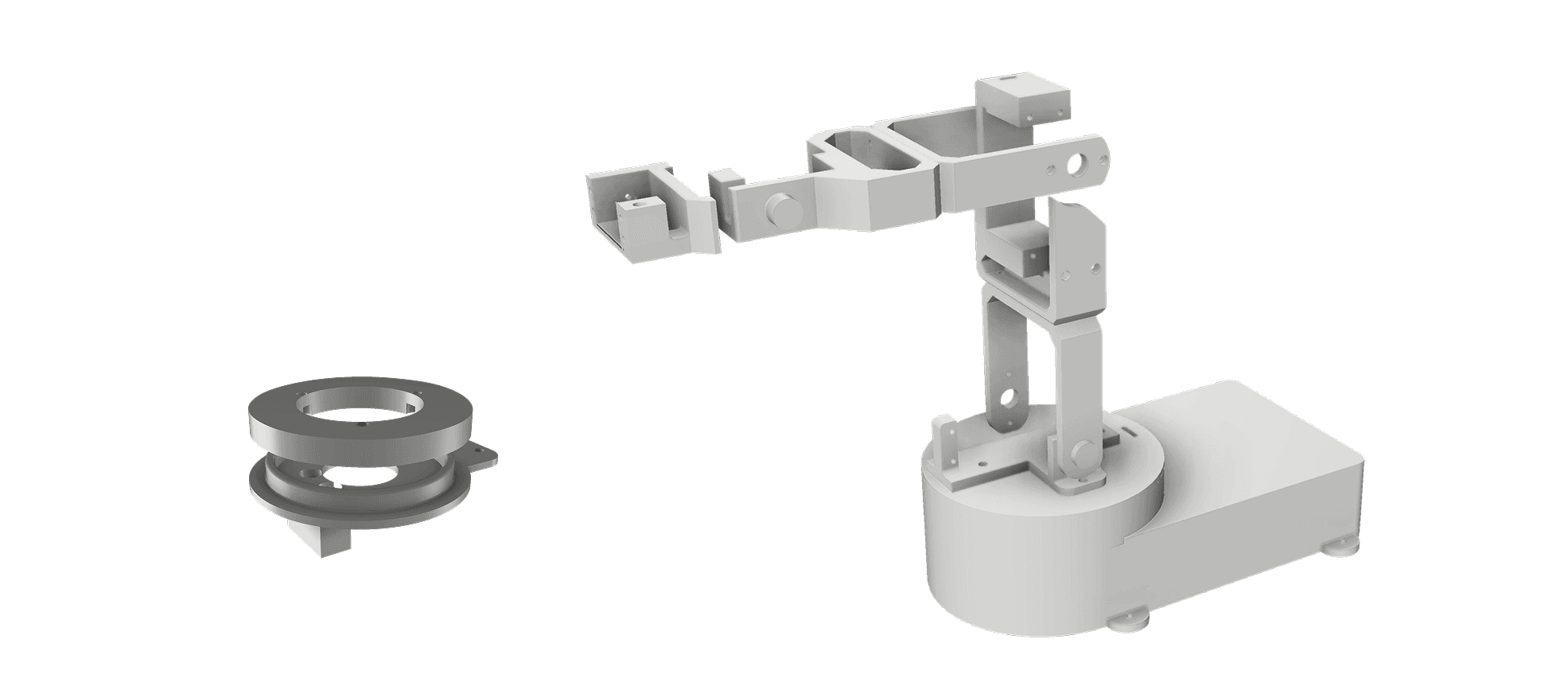
Lightweight, modular, and affordable. We designed a 3D-printed arm with human-like reach, an adaptive hand for common kitchen objects, and a stable base that tolerates repeated motion around hot cookware.
Software
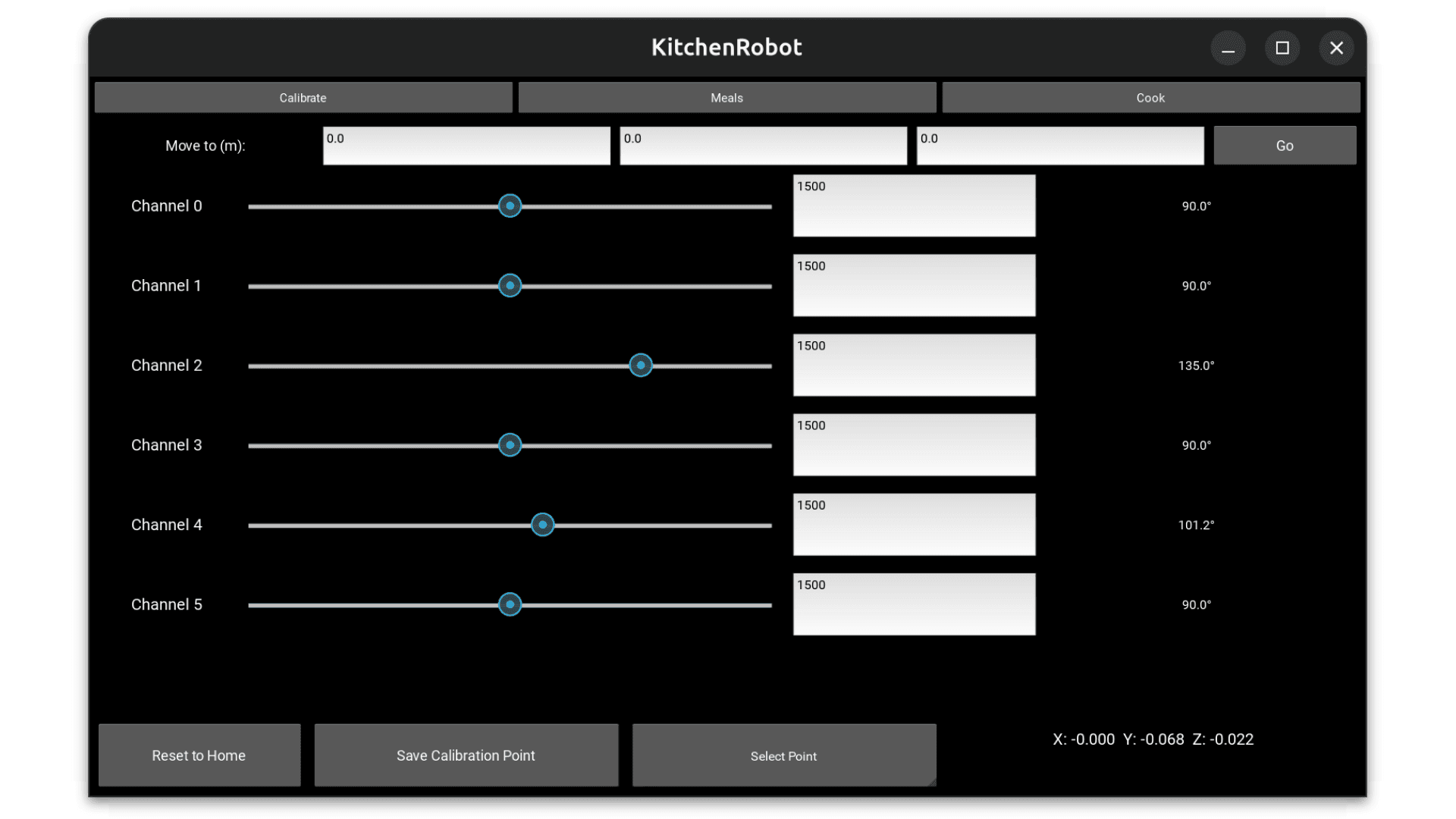
A calibration UI for joint limits, a custom IK solver for 5-DoF reach, and a motion layer that translates plans into smooth routines. Each step is tuned for kitchen tasks and easy re-use.
Object Detection
The system identifies ingredients and tools in real time, so Kokki can adapt to slightly different placements on the counter and around the stove.
Pick, Pour & Place
A staple routine: approach, grasp, pour to a target, then set the container down—cleanly. Timing, wrist orientation, and safe clearances keep the motion dependable.
Conclusion
Kokki shows how a small, well-designed robot can safely share a kitchen with people—handling repeatable tasks without getting in the way. Next steps: stronger gripper joints, more robust tracking, and a growing recipe library.
Team credit
Built by Peng Boris Akebuon, Joel Adebayo, Rutaremara Wilson, andJulius Aries Kanneh — CMU-Africa, Humanoid Robotics (Instructor: Prof. Conrad Tucker).